By: Ed Herceg Chief Technology Officer
GE Position Sensors for Power Generation Turbines
How they work and how to operate them with an ASG S2A LVDT signal conditioner
LVDTs (Linear Variable Differential Transformers) are very commonly used as position sensors in power plants throughout the world. Working from AC voltages and frequencies not available from power lines, LVDTs require a signal conditioner to provide the necessary operating power. Alliance Sensors Group's model S2A module, designed specifically to be used in power gen applications, is considered by many power gen users be the most advanced and easy-to-use single channel LVDT signal conditioner on the market today. It can operate practically any LVDT or half-bridge (LVRT) position sensor currently in use.
However, users and systems integrators can be confused by unusual LVDT configurations, particularly in regard to the General Electric 185A1328 and 311A5178 series of LVDTs typically used with their gas turbines. Furthermore, for many years, GE has been using a contactless position sensor known as an inductive half-bridge for measuring the position of the operating shafts of steam turbine control valves. These sensors, often called VRTs or LVRTs, are used to provide position feedback from modulating throttle and governor valves, as well as to give open or closed condition feedback from bypass, stop, and interceptor valves. They are also used to monitor valve position on some turbine feedwater pumps. Some typical GE half-bridge part numbers include the 119C9638, 119C9639, and 196C8768 series. Again, there is some confusion among many systems integrators about how to connect these GE half-bridge sensors to an LVDT signal conditioner and how to calibrate them. This paper should help dispel any confusion about operating an S2A with a GE gas turbine LVDT or steam turbine half-bridge sensor.
Operating GE Gas Turbine LVDTs with an ASG S2A LVDT Signal Conditioner
The first section of this paper shows how these GE LVDTs differ from conventional LVDTs and how to operate them with an S2A LVDT signal conditioner module. To understand the differences between GE Gas Turbine LVDTs and conventional LVDTs, it is important to review the characteristics of an ordinary LVDT. Regardless of the method of construction actually used to make a conventional LVDT, it has a primary winding and two identical secondary windings that are usually connected in series opposition, with a movable permeable core to couple the primary to the secondaries, as shown in Figure 1 below.

The electrical output of a typical LVDT as a function of its core's position is shown in Figure 2 below. Note that the plot of its AC output amplitude versus position shows the classical "V" shape commonly associated with an LVDT, with a minimum value called null at the center of its range of motion, and an increased output amplitude for core positions on either side of null. More important is the fact that the phase relationship of the differential AC output to the primary input voltage shifts abruptly by 180° as the core moves through null. It is this 180° phase shift that permits a user to know on which side of null the core is positioned. The voltages and frequency shown are typical of those found in the operation of a conventional LVDT. It is important to note that the actual excitation voltage utilized makes very little difference to an LVDT's performance. Only the excitation frequency is important for proper operation.

The configuration of the LVDTs used by GE for various position sensing functions on their gas turbines is shown in Figure 3 below. The most obvious difference is the tap on the primary, but otherwise it does not seem to vary much from the view of a conventional LVDT. However, its electrical operation is really substantially different. Although it is tempting to view the primary tap as a center tap, it is not a center tap at all. Most often it is a 30% tap, but on a few models it is a 25% tap. The voltages shown are typical of those used by GE, but, as noted above, the sensor is a differential transformer and will function with whatever AC voltage is applied to operate it. For the sake of clarity, typical GE I/O values are used for the explanation of how this variety of LVDT works.
This LVDT hookup is generally known as a "Buck-Boost" configuration. As can be seen in Figure 3, the voltage at the tap is 30% of the excitation voltage that is being applied to the LVDTs primary, and is in phase with the primary voltage. The way the windings are connected, this 30% voltage, etap, is being added to the differential secondary voltage, which consists of e1, which is in phase with the primary voltage, to which has been added e2, which is 180° out of phase with the primary voltage. The turns ratio of these GE LVDTs is usually about 5:1, so, with a 7.07 V ACrms input, the full scale output of the secondaries, without the effect of the 30% tap, would be about 1.4 V ACrms, either in phase with the primary excitation or 180° out of phase with it. However, the 30% tap inserts an additional 2.1 V ACrms that is in phase with the primary excitation to be added to the voltages already in the secondaries. The result is plotted in Figure 4, which shows that the total AC output from the series connection of the two secondaries and the 30% tap is a voltage between 0.7 to 3.5 V ACrms, with no 180° phase shift as the LVDT's core moves from one end of its range of motion through null to the other end of its range.

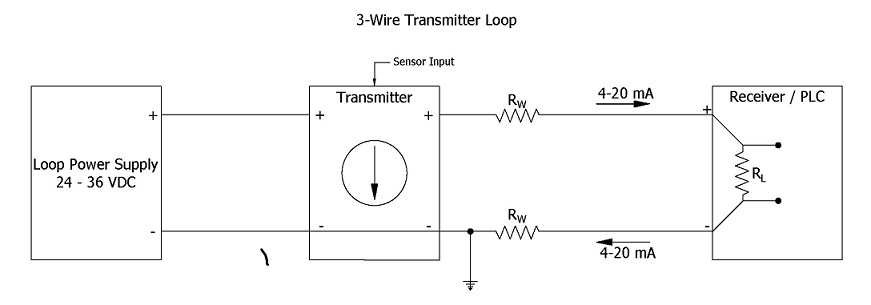
The electronics used by GE in their controllers requires this unusual AC output, but almost all these "Buck-Boost" LVDTs can be successfully operated with an ASG S2A signal conditioner module by using the appropriate connection configuration. The first thing to do is to ignore any connection to the primary tap. Instead, connect the LVDT in a 3-wire configuration, as shown in the S2A instruction manual. In this configuration, the high end of the primary is connected to J1-1 (or J1-2, if the output directional sense is reversed), the common connection of the primary and the series-connected secondaries is connected to J1-3, and the secondaries' high output is connected to J1-4. It is also necessary to move jumper J10 to its alternate position and to shift jumper J7 over to its high output position to increase the excitation to the LVDT's primary. After this 3-wire connection for a "Buck-Boost" LVDT has been completed, the S2A can be operated and the LVDT be calibrated in the normal manner shown in the S2A module's manual.

Operating GE Steam Turbine Half-bridge (LVRT) Sensors with an S2A Signal Conditioner
First it is necessary to understand how GE half-bridge sensors function to see how to use them with an S2A signal conditioner. Figure 5 shows the schematic of a typical GE half-bridge sensor. Note that pins D and E play no role in the operation of the sensor, but are merely part of an "interrupt jumper" system which is used to notify the turbine control system that the connector has been removed. As shown in the schematic, the sensor consists of two identically-wound inductor coils connected in series encircling a movable permeable core long enough to overlap a portion of each coil. An AC voltage ein is applied to pins A and C. If the core is located symmetrically between the coils, each coil will have the same impedance and, assuming the output has no load, voltage eout between pins B and C will be 1/2 of ein.

If the core is moved to include more of the coil connected between pins A and B, the inductance, and therefore the impedance, of that winding will increase, while the inductance, and hence the impedance, of the coil connected between pins B and C will decrease. The result will be a drop in the voltage eout. If the core were moved in the other direction, the reverse action would happen and eout would increase.
Thus, the half-bridge acts as an AC voltage divider. Over a limited range of motion, and excited at an appropriate input frequency, this operation can be reasonably linear if the change in impedance of each winding is largely due to its inductance rather than to its DC resistance, as shown in Figure 6 below.

The shaded symmetrical areas represent the different AC output levels developed by different sensors. Several things stand out in Figure 6. First is that the output at mid-range is not zero as with an LVDT, but is half of the AC excitation. Second, there is not a 180° phase shift at "null" as with an LVDT. Both features specifically facilitate interfacing these sensors with GE's Mark 2 - 6 turbine control systems.
There are two other very important points of note in the operation of half-bridge sensors, both of which concern the excitation of the sensors. First, the magnitude of the AC excitation voltage has no bearing at all on the functioning of these sensors. The choice of 7.07 Vrms (20 Vp-p) by GE is merely dependent on the requirements of their control system. Second, the excitation frequency is chosen to make sure the impedance of the two windings is dominated by their inductive reactance at the chosen frequency, so that the DC resistance of the windings has a fairly small overall effect on the winding impedances.
When looking at Figure 6, it is easy to understand why it can be unduly difficult to set up and calibrate these GE half-bridge position sensors in the field. The primary reason is that a half-bridge sensor does not have a uniquely identifiable point in its range of motion like an LVDT's null point. Fortunately, ASG's S2A LVDT signal conditioner was designed not merely to work with inductive half-bridges, but to make their operation emulate that of an LVDT. Thus, anyone familiar with the techniques for calibrating an LVDT position sensor installed in a valve position feedback system using an S2A module will be able to utilize those very same techniques to calibrate a GE half-bridge sensor connected to an S2A module.
Figure 7 below shows that a GE inductive half-bridge connected to an S2A signal conditioner displays exactly the same type of AC output as would be developed if the S2A were connected to an LVDT. When using an S2A with a half-bridge sensor, the front panel LEDs function in the same way during calibration as if it were an LVDT, as does the Null Output voltage available at J4-1 and J4-2. While this app note has focused on the GE half-bridges used in power plants, these same considerations apply to operating any inductive half-bridge sensor with an S2A or any of its derivative LVDT signal conditioners.


The connection diagram for hooking up GE half-bridges to an S2A signal conditioner module is shown above. Hook up the GE half-bridge connector's pins to the numbers on the black plug, J1, as follows: Pin A goes to J1-1, pin B goes to J1-4, and pin C goes to J1-2. Pins E and F are not connected to the S2A at all. Also, move jumpers J7 and J10 over to their alternate positions. If the directional sense of the S2A's analog output is reversed from the desired output, either interchange the connections to J1-1 and J1-2, or flip the INVERT switch, DS2-3, inside of the S2A.
50/60 Hz GE Half-bridge Sensors used with ASG S2A Signal Conditioners in Steam Power Plants
This paper was based on the most common GE half-bridge sensors likely to be found in power plants today, all of which operate at 3 kHz. However, early on, GE used some half-bridge sensors that were operated with 24 Volts AC at 50/60 Hz and some even used 115 Volts AC, 50/60 Hz. Both systems integrators and power gen utilities should be aware of the risks of continuing to use a more than half-century old design of 50/60 Hz-operated GE half-bridges instead of the newer 3 kHz-operated sensors.
These 50/60 Hz units do not contain much ferromagnetic material beyond their core so their windings utilize many turns of fine wire to achieve the needed inductance. As a result, their winding impedance has a large resistive component, so that much of the AC input power gets dissipated in the resistance of the windings, leading these sensors to get quite hot internally during normal operation.
Because of the effects of thermal expansion and contraction on the winding insulation, these 50/60 Hz units have a history of developing intra-winding shorts, but which do not immediately produce significant output changes because there are so many turns of wire on each winding. Furthermore, sensor output linearity is also poor to begin with, typically ± 2% at FSO, and ± 5% at 110% of FSO, which often initially masks the effects of any such internal shorts. But over a period of time, the internal winding shorts can and often do increase, causing a net calibration shift that could result in a significant sensor output error.
Despite these issues, several integrators have had success using these old 50/60 Hz GE half-bridge sensors with an ASG S2A LVDT signal conditioner by operating them with the S2A's 1 kHz excitation frequency. In fact, some old sensors had such a low winding impedance at 1 kHz that it was necessary to operate them at 3 kHz. Typically, those integrators have utilized old stock of unused spares or ordered new units built to the old design, mostly because their utility customers are reluctant to change sensors over to newer, more reliable products, particularly in nuclear power plants, because of issues with certifications, testing, and related documentation. Even so, it is important to bear in mind that these 50/60 Hz sensors utilize a genuinely obsolete design, and that contactless inductive position sensing technology and sensor reliability have improved substantially in the intervening half-century or more.
To download a PDF of this FAQ, please click here..